图像匹配中Harris角点特征提取
在进行图像检测或者是识别的时候,我们需要提取出一些有特征的点加以识别,最常用的就是基于点的识别。这里所谓的点,其实就是一些重要的点,比如轮廓的拐角,线段的末端等。这些特征比较容易识别,而且不容易受到光照等环境的影响,因此在许多的特征匹配算法中十分常见。
常见的特征点提取算法有Harris算 子(改进后的Shi-Tomasi算法)、Moravec算子、Forstner算子、小波变换算子等。现在就先介绍一下最常用的Harris角点检测算法。
简介
Harris算法的思想很简单,也很容易理解。
我们知道角点附近的区域相比于其他地方有这样一个显著的特点,就是无论沿着哪一个方向看,他灰度的变化率始终是很大的。也就是说假设我们有一个矩形窗口罩在角点附近,将这个窗口顺着任意方向移动一小段距离得到一个新的区域,将这个新的区域与旧的区域对应点的灰度做差得到的值始终很大。相比之下,平滑区域的变化就很小,而边缘区域沿着某些方向变化率大、某些方向变化率小。
Harris算法利用的就是这个特点,他首先定义了一个窗口函数$w(x,y)$来表示他选择的窗口区域,$(x,y)$表示点的坐标,$w(x,y)$表示这个坐标所占的权值。有时候我们用0-1赋值,表示选定一块区域,也有时候我们用高斯滤波减少噪点的影响;然后定义了一个方向向量$(u,v)$,以及$E(u,v)$表示窗口沿着$(u,v)$方向移动后的梯度变化情况。并将$E(u,v)$做如下定义:
$E(u,v)=\underset{x,y}{\Sigma} w(x,y)[I(x+u,y+v)-I(x,y)]^2$
其中$I(x,y)$表示点$(x,y)$的灰度值。
根据上面的介绍我们知道角点的特征就是$E(u,v)$的值取较大值。那么为了更方便的计算,我们对他需要进行一下化简:
泰勒展开:$I(x+u,y+v)-I(x,y)=I(x,y)+uI_x+vI_y$
其中$I_x,I_y$分别为灰度沿x,y方向的导数。
转化为矩阵形式:$E(u,v)=[u\ v]M\begin{bmatrix}u\\v\end{bmatrix},M=\underset{x,y}\Sigma w(x,y)\begin{bmatrix}I_x^2&I_xI_y\\I_xI_y&I_y^2\end{bmatrix}$
最后定义一个估价函数R:
$R=det(M)=k(trace(M))^2$
其中$det(M)=\lambda_1\lambda_2,trace(M)=\lambda_1+\lambda_2$,k是一个控制参数。
$\lambda_1,\lambda_2$为M的特征值。
这个估价函数个特性,就是当R较小时,图像是平坦的;当R小于0时,图像是一个边缘;当R很大时,这个图像是一个角点。因此通常我们会对R设置一个阈值,大于这个阈值的点我们可以看做是角点。
OpenCV调用
OpenCV里封装了Harris算法,调用下看看效果,就不自己实现了。
#coding:utf-8
import cv2
import numpy as np
img=cv2.imread('test.png',cv2.IMREAD_GRAYSCALE)
cv2.imshow('gray.png',img)#控制背景为黑色
cv2.imwrite('gray.png',img)
im=np.float32(img)
dst=cv2.cornerHarris(im,3,3,0.04)#生成估价矩阵
height,width=dst.shape
mark=dst>0.01*dst.max()#寻找具有较大权值的像素点
height,width=mark.shape
for i in xrange(height):
for j in xrange(width):
if mark[i][j]:
cv2.circle(img,(j,i),5,255)#标记得到的点
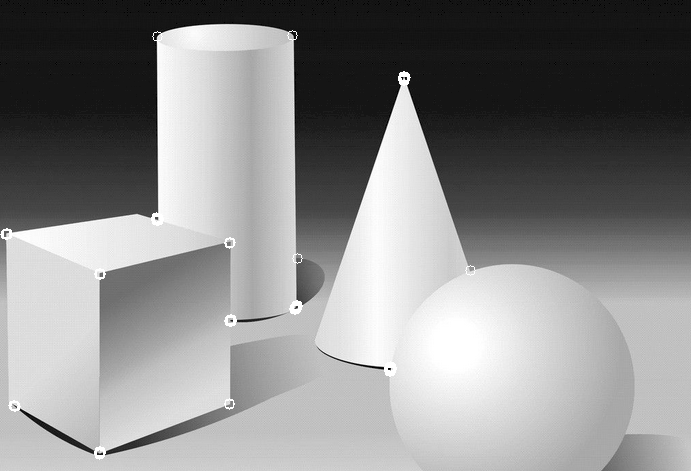
cv2.imshow('Harris.png',img)
cv2.imwrite('Harris.png',img)
cv2.waitKey(0)
cv2.destroyAllWindows()
重要的步骤就是在估价矩阵里找到较大的那些点。
效果图